Définition simple : un filtre passe-bas permet de « laisser passer » les signaux de basse fréquence et de supprimer les signaux de haute fréquence.
On peut réaliser un tel filtre avec simplement une résistance et un condensateur, comme montré ci-dessous.
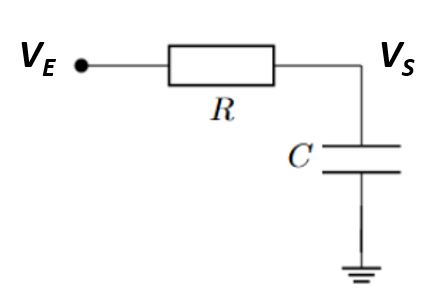
Où VE est le signal en entrée du filtre, VS est le signal en sortie du filtre, R est la résistance et C est le condensateur.
On remarque que l’on a un pont diviseur de tension. On peut donc écrire :
\(V_S = \frac{Z_C}{Z_C + R} \times V_E\)
\(V_S = \frac{\frac{1}{j\omega C}}{\frac{1}{j\omega C} + R} \times V_E\)
\(V_S = \frac{1}{1 + j \omega RC} \times V_E\)
avec \(\omega \) la pulsation et \(RC \) la constante de temps. On rappelle que \(\omega = 2 \pi f \)
Etude rapide
Dans un premier temps, faisons une étude rapide afin d’avoir une idée du comportement de notre filtre (on ne tiendra donc pas compte de la valeur de \(RC \) pour l’instant) :
- Si la fréquence est trop petite (\(\omega \) tend vers 0), le terme \(j \omega RC \) devient négligeable devant 1. On obtient alors :
\(V_S \approx V_E\)
- Si la fréquence est trop grande (\(\omega \) tend vers l’infini), 1 devient négligeable devant le terme \(j \omega RC \). On obtient alors :
\(V_S \approx 0 V\)
Cette petite étude nous donne déjà une idée du comportement de ce filtre. On constate qu’avec une basse fréquence, le signal de sortie est environ égal au signal d’entrée (le filtre a « laissé passer » le signal). Inversement, avec une haute fréquence, on obtient 0 V en sortie (le filtre n’a pas « laissé passer » le signal). On a donc bien le comportement d’un filtre de type passe-bas.
Etude détaillée
Maintenant, faisons une étude plus détaillée. Comme vous avez pu le constater, l’effet de filtrage se trouve dans le terme devant \(V_E \), c’est-à-dire le rapport entre le signal de sortie et le signal d’entrée. Ce rapport est appelé fonction de transfert et se note généralement \(H(j\omega) \) :
\(H(j\omega) = \frac{V_S}{V_E} = \frac{1}{1 + j \omega RC} = \frac{1}{1 + j 2 \pi f RC}\)
Contrairement à l’étude rapide que nous avons faite précédemment, on doit ici tenir compte de la valeur de \(RC \), car en réalité, c’est cette valeur là qui va déterminer le comportement de notre filtre. Et on sait que cette valeur dépend directement des valeurs de la résistance et du condensateur.
On va donc étudier le comportement de notre filtre en comparant la valeur de \(RC \) avec la valeur de la fréquence du signal en entrée. L’idée est de donc connaître la fréquence à partir de laquelle notre filtre ne laisse plus passer le signal.
Etant donné que la fonction de transfert contient un nombre complexe, on prendra le module de celle-ci :
\(|H(j\omega)| = |\frac{1}{1 + j \omega RC}| = \frac{1}{ \sqrt{1 + (\omega RC)^2}} = \frac{1}{ \sqrt{1 + (2 \pi f RC)^2}} = \frac{1}{ \sqrt{1 + (\frac{f}{f_c})^2}}\)
Par identification, on a \(f_c = \frac{1}{2 \pi RC}\). C’est donc cette fréquence qui va nous indiquer la limite entre la plage de fréquences dans laquelle le signal peut passer et la plage de fréquences dans laquelle le signal sera « coupé ». On appelle souvent cette fréquence la fréquence de coupure (ou plus précisément, fréquence de coupure à -3 dB).
Il faudra alors comparer la fréquence de notre signal en entrée (fréquence \(f \)) avec la fréquence de coupure (fréquence \(f_c \)) :
- Si \(f = f_c \) :
\(|H(j\omega)| = \frac{1}{\sqrt 2}\)
- Si \(f < f_c \) :
\(|H(j\omega)| > \frac{1}{\sqrt 2}\)
- Si \(f > f_c \) :
\(|H(j\omega)| < \frac{1}{\sqrt 2}\)
Pour mieux voir l’effet de filtrage, on préfère généralement exprimer la valeur de \(|H(j\omega)|\) en dB. Pour exprimer le module en dB :
\(|H(j\omega)|_{dB} = 20log(|H(j\omega)|)\)
Lorsque \(f = f_c\), on a donc :
\(20log(\frac{1}{\sqrt{2}}) \approx -3\,\text{dB}\)
Comme on peut le voir, lorsque la fréquence du signal est égale à la fréquence de coupure, le module de la fonction de transfert vaut -3 dB. C’est pour cela que l’on peut parler de fréquence de coupure à -3 dB.
Il faut savoir également que le signal en sortie sera déphasé par rapport au signal en entrée car il y a présence d’un condensateur dans notre filtre. Ce déphasage va donc dépendre de la fréquence. Pour calculer la phase :
\(\phi(H(j\omega)) = \arg(H(j\omega)) = -\arg(1 + j \omega RC) = -\arctan(\omega RC) = -\arctan(\frac{f}{f_c})\)
- Si \(f = f_c \) :
\(\phi(H(j\omega)) = -\arctan(1) = -45°\)
- Si \(f < f_c \) :
\(\phi(H(j\omega)) > -45°\)
- Si \(f > f_c \) :
\(\phi(H(j\omega)) < -45°\)
Pour mieux visualiser l’effet de filtrage, on peut tracer la courbe de \(|H(j\omega)|_{dB}\) en fonction de la fréquence du signal d’entrée (fréquence \(f\)). On peut aussi tracer la courbe de phase (\(\phi\)).
Ces deux tracés forment ce qu’on appelle le diagramme de Bode.
La figure ci-dessous montre à quoi ressemble ces deux courbes. On prend \(f_c = 1\,\text{kHz} \) pour cet exemple.
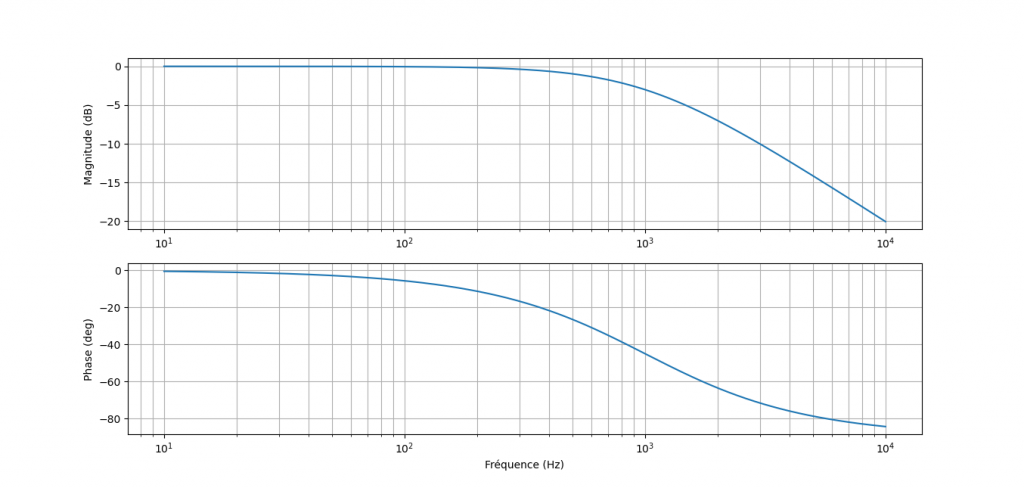
La courbe Magnitude correspond au module de la fonction de transfert en dB (\(|H(j\omega)|_{dB} \)).
La courbe Phase correspond à la phase en degrés.
On remarque que lorsque la fréquence du signal est petite devant \(f_c\), le module de la fonction de transfert est environ égal à 0 dB, ce qui signifie que qu’il n’y aucune perte en sortie du filtre. C’est normal car notre filtre laisse passer les signaux de basses fréquences.
Inversement, lorsque la fréquence du signal est grande devant \(f_c\), le module chute de 20 dB à chaque fois que la fréquence est multipliée par 10. Cela signifie donc que c’est une pente à -20 dB/décade. On peut démontrer cela facilement en reprenant notre formule de base et en calculant le module pour différentes valeurs de \(f\).
Rappel de la formule du module de la fonction de transfert en dB :
\(|H(j\omega)|_{dB} = 20log(|H(j\omega)|) = 20 log \left( \frac{1}{ \sqrt{1 + (\frac{f}{f_c})^2}} \right) \)
On va calculer \(|H(j\omega)|_{dB} \) pour différentes valeurs de \(f \), en la multipliant à chaque fois par 10 :
- Si \(f = 10f_c \) :
\(|H(j\omega)|_{dB} = 20 log \left( \frac{1}{ \sqrt{1 + (\frac{10f_c}{f_c})^2}} \right) = 20 log \left( \frac{1}{ \sqrt{1 + 10^2}} \right) \approx 20 log (0,1) \approx -20\,\text{dB} \)
- Si \(f = 100f_c \) :
\(|H(j\omega)|_{dB} = 20 log \left( \frac{1}{ \sqrt{1 + (\frac{100f_c}{f_c})^2}} \right) = 20 log \left( \frac{1}{ \sqrt{1 + 100^2}} \right) \approx 20 log (0,01) \approx -40\,\text{dB} \)
- Si \(f = 1000f_c \) :
\(|H(j\omega)|_{dB} = 20 log \left( \frac{1}{ \sqrt{1 + (\frac{1000f_c}{f_c})^2}} \right) = 20 log \left( \frac{1}{ \sqrt{1 + 1000^2}} \right) \approx 20 log (0,001) \approx -60\,\text{dB} \)
Et ainsi de suite.
D’après les résultats ci-dessus, on a bien un écart de -20 dB à chaque fois que la fréquence est multipliée par 10.
En ce qui concerne la phase du signal en sortie, on constate que lorsque la fréquence du signal d’entrée est petite devant \(f_c\), le signal en sortie est déphasé d’environ 0°. C’est normal car notre filtre laisse passer les signaux de basses fréquences.
Inversement, lorsque la fréquence du signal d’entrée est grande devant \(f_c\), la phase du signal en sortie se rapproche de -90° environ. La raison est simple : quand \(f\) devient trop grande devant \(f_c\), on a \(arctan\) d’un nombre trop grand. Et on sait mathématiquement que la limite de \(arctan(x)\) quand \(x\) tend vers l’infini vaut 90°.
Exemple pratique
Supposons que l’on dispose de plusieurs résistances et de condensateurs dans un tiroir et que l’on souhaite réaliser un filtre qui laisse passer les signaux dont la fréquence est inférieure à 20 kHz. Les signaux au-delà de cette fréquence seront « coupés ». Autrement dit, il faut que la fréquence de coupure \(f_c \) soit égale à 20 kHz.
L’idée est donc de trouver les valeurs de la résistance et du condensateur à choisir afin d’arriver à notre objectif \(f_c = 20\,\text{kHz} \).
On sait que :
\(f_c = \frac{1}{2 \pi RC} \)
Donc :
\(RC = \frac{1}{2 \pi f_c} \)
On souhaite \(f_c = 20\,\text{kHz} \). On a alors :
\(RC = \frac{1}{2 \pi\,.\,20\,.\,10^3} \approx 7,96\,\mu\text{s} \)
Il reste maintenant à trouver les valeurs de R et de C.
Par exemple, on peut poser \(C = 1\,n\text{F} \). On calcule alors la valeur de \(R\) :
\(R = \frac{7,96\,.\,10^{-6}}{1\,.\,10^{-9}} = 7,96\,k\Omega \)
Il nous faudra donc prendre une résistance de \(7,96\,k\Omega \) et un condensateur de \(1\,nF \) afin de réaliser notre filtre passe-bas.